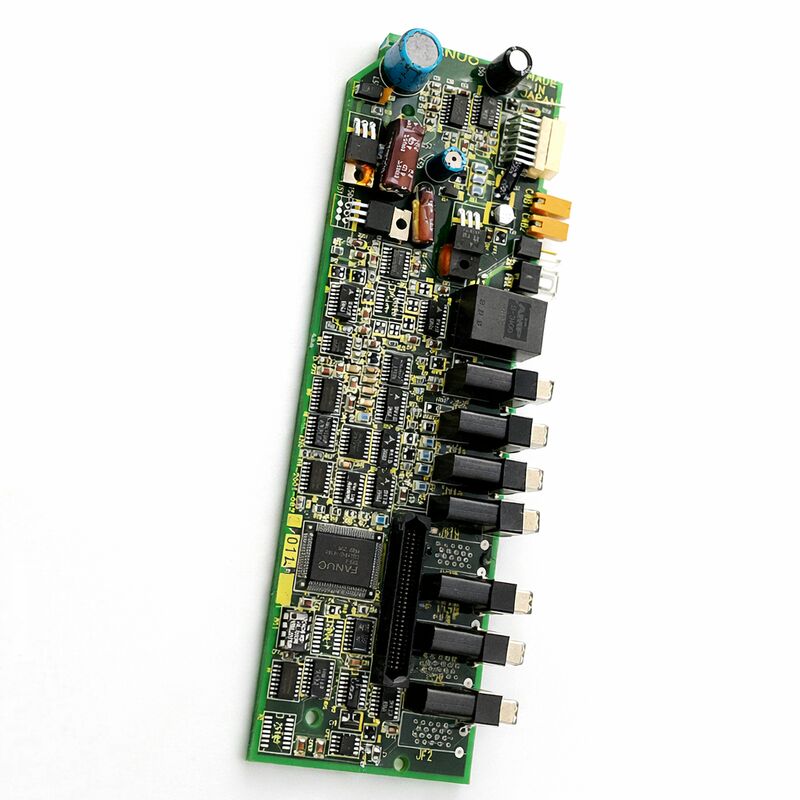
FANUC A20B-2001-0821 | Alphaシリーズ SVMサーボ制御基板 — CNCおよびロボット、日本製造
部品番号: A20B-2001-0821
メーカー: FANUC株式会社 (日本)
製品タイプ: サーボアンプ制御基板 (SVM PCB)
基板シリーズ: A20B-2001
ドライブファミリー: FANUC Alphaシリーズ サーボアンプモジュール (SVM)
用途: FANUC CNCおよびロボットサーボドライブシステム
概要
A20B-2001-0821は、FANUCのAlphaシリーズサーボアンプモジュール(SVM)用のサーボアンプ制御基板です。
FANUCのモジュラーAlphaドライブアーキテクチャにおいて、SVMはサーボモーターに直接電力を供給するアンプユニットです。PSMから供給されるDCバス電圧を受け取り、モーターを駆動する3相可変周波数ACに変換します。
A20B-2001-0821は、SVM内の制御基板であり、サーボドライブの電流ループ、速度ループ、エンコーダフィードバックインターフェース、およびCNC通信の処理電子機器を含むPCBです。
Alphaシリーズドライブは、幅広いFANUC制御工作機械および産業用ロボットに展開されていました。
CNCマシニングセンタでは、各軸モーターに独自のSVMがあります。6軸産業用ロボットでは、各ジョイントモーターに独自のSVMがあるか、隣接するSVMユニットと共有されます。
これらのSVMのそれぞれに制御基板が含まれています。サーボドライブ制御基板が故障すると、その軸またはジョイントが停止し、正しい交換基板があれば再起動します。
A20B-2001シリーズは、複数のAlpha SVM構成に対応する制御基板を網羅しており、異なるドライブ電流定格およびインターフェースタイプをカバーしています。
-0821バリアントは、このファミリー内の特定のSVMモデルおよびハードウェアリビジョンに対応します。
この基板は日本で製造されており、産業用サーボドライブアプリケーションの連続デューティ要件に対応するように設計されています。
主な仕様
| パラメータ |
値 |
| 部品番号 |
A20B-2001-0821 |
| メーカー |
FANUC株式会社 |
| 製品タイプ |
サーボアンプ制御基板 |
| 基板シリーズ |
A20B-2001 |
| ドライブファミリー |
FANUC Alphaシリーズ SVM |
| 用途 |
FANUC CNCおよびロボットサーボドライブ制御 |
| 原産国 |
日本 |
| 動作温度 |
0 – 55℃ (SVMユニットに組み込まれた状態) |
| 保管温度 |
−20 – 55℃ |
| 湿度 |
75% RH 最大 (結露なきこと) |
| 利用可能な状態 |
新品 (余剰品) / 再整備品 / 修理品 |
SVM制御基板 — 3つのループを1つに
サーボドライブ制御基板は、サーボフィードバック制御の3つのレベルすべてを同時に実行します。これらのループがどのように連携して機能するかを理解することで、正常に機能するサーボドライブがどのように精密に動作するのか、そして制御基板が劣化すると何が故障するのかがわかります。
電流ループが基盤です。
SVMの電流センサーからモーターの相電流を読み取り、速度コントローラーからの電流コマンドと比較し、実際の電流をコマンドレベルに引き上げるためにIGBTゲート信号を調整します。このループは数万ヘルツのレートで実行されます。
基板上の電流測定回路の劣化は、このループにエラーを発生させ、モーターのノイズ、振動、熱として現れる電流歪みを生成します。
速度ループは電流ループの上に位置します。
エンコーダフィードバックを読み取り、実際のモーター速度を計算し、位置コントローラーからのコマンド速度と比較し、電流コマンドを生成します。
このループは数百マイクロ秒ごとに更新されます。
エンコーダインターフェース回路の劣化は、速度フィードバックにノイズを引き起こし、速度の不安定性を引き起こします。
位置ループが最上位に位置します。CNCの補間器から位置ターゲットを受信し、実際のエンコーダ位置と比較します。
位置誤差が速度コマンドを駆動します。このループのクローズは、通常1ミリ秒のサーボサイクルごとに発生します。
機械の位置決め精度の最終的な決定は、これら3つのループすべてがこの制御基板上でどれだけうまく連携して実行されるかによって決まります。
CNCおよびロボットアプリケーションにおけるAlpha SVM
CNC工作機械では、Alpha SVMモジュールはドライブキャビネット内のPSMの隣に取り付けられます。各SVMは1つの軸を駆動します。3軸マシニングセンタでは、通常3つのSVM(X用、Y用、Z用)とスピンドルアンプモジュールがあります。
これらのSVM内の制御基板は、FANUCのシリアルサーボバスを介してCNCと通信し、位置コマンドを受信し、エンコーダ位置を報告します。
FANUC産業用ロボットコントローラーでは、同じSVMアーキテクチャがロボットのジョイントモーターを駆動します。
例えば、R-J3コントローラー世代では、ロボットの6つのジョイント軸にAlpha SVMが使用されていました。
ロボットコントローラーは、CNCと同じシリアルインターフェースを介してこれらのSVMと通信します。
A20B-2001-0821制御基板は、ハードウェアアーキテクチャが一貫しているため、両方のアプリケーションコンテキストに対応します。
このクロスアプリケーション互換性は、メンテナンスにおいて実用的な利点となります。
廃止されたロボットの制御基板は、基板の完全な部品番号が正確に一致する場合、CNC機械の交換用として、またはその逆としても使用できる可能性があります。
制御基板の故障の特定
サーボドライブ制御基板の故障は、他のドライブシステム障害とは異なる特定の症状パターンを示します。
位置誤差、速度の不安定性、または他のすべての軸が正常に動作しているにもかかわらず、特定の軸にのみ現れる異常なモーターノイズは、その軸のSVM制御基板またはそのエンコーダフィードバックパスを示唆します。制御基板の問題は、軸固有で一貫している傾向があります。
電源投入時にレディ状態に入らないドライブで、モーションがコマンドされる前にVRDY(速度レディ)アラームが表示される場合は、制御基板の故障の強い兆候です。
基板は電源投入時に自己診断を実行します。このシーケンスでの障害は、即時的で持続的なアラームを生成します。
温度とともに悪化する間欠的な位置誤差(ドライブが冷たいときは正常に動作し、暖まると劣化する)は、制御基板上の熱に敏感なコンポーネントの寿命が尽きかけていることを示唆します。
FAQ
Q1: CNCの1つの軸で、電源投入時に持続的なVRDYアラームが発生します。DCバス電圧は正常です。他の軸は正常です。これはA20B-2001-0821ですか?
電源投入時の単軸VRDYアラームで、DCバスが正常で他の軸も正常な場合は、制御基板の故障と一致します。
基板の電源投入時自己テストが失敗しました。SVMのLEDインジケータでアラームコードを確認してください。
エンコーダケーブルとフィードバックコネクタが正しく接続されていることを確認してください。フィードバックコネクタの緩みもこの症状を引き起こす可能性があります。
ケーブルが良好であることが確認された場合は、制御基板を交換してください。
Q2: 低速では正常に動作しますが、高速フィードレートで位置誤差が増加します。機械システムは正常に見えます。これは制御基板の可能性がありますか?
機械システムが正常で、高速フィードレートで位置誤差が増加する場合は、サーボ制御ループを示唆します。
速度ループまたは電流ループが十分に速く応答していない可能性があります。これは制御基板の処理回路が劣化している兆候です。
サーボパラメータ(ループゲイン、フィードフォワード)も確認して、正しいことを確認してください。
パラメータが正しく、問題が続く場合は、制御基板のDSPまたはインターフェース回路が経年劣化している可能性が高いです。
Q3: 軸モーターが静止時に異常な振動とノイズを発生しますが、モーション中の位置精度は許容範囲内です。制御基板の何が原因でしょうか?
静止時の振動とノイズで、モーション中の精度が許容範囲内である場合は、通常、電流ループの問題、特に制御基板の電流測定またはゲート駆動セクションの問題を示します。
静止時の電流フィードバックの小さな誤差またはノイズは、振動として現れる電流のジッタを引き起こします。
このタイプの故障は、コンポーネントの経年劣化とともに温度とともに悪化することがよくあります。制御基板を交換して、静止時の動作を比較してください。
Q4: ロボットアプリケーション用の交換用A20B-2001-0821基板をCNC工作機械に使用できますか?
部品番号が正確に一致する場合、ハードウェアは互換性があります。
サーボ制御基板は、CNCおよびロボットアプリケーションで同じ機能を実行します。違いはコントローラーソフトウェアと機械システムにあり、ドライブ基板ではありません。
完全な部品番号(-0821サフィックスを含む)が一致することを確認してください。基板が物理的に似ていても、異なるサフィックスを代用として使用しないでください。
Q5: 制御基板交換後、軸が移動ごとにターゲット位置をオーバーシュートします。パラメータはバックアップから復元されました。原因は何でしょうか?
基板交換後にパラメータを復元した後の位置オーバーシュートは、通常、正しく復元されなかったサーボループパラメータを示します。
位置ゲイン、速度ゲイン、またはフィードフォワード補償値が間違っている可能性があります。
影響を受ける軸の各サーボパラメータを、機械のドキュメントおよびバックアップ値と比較してください。
エンコーダタイプの設定が正しいことも確認してください。間違ったエンコーダタイプ設定を使用すると、オーバーシュートまたは振動として現れるフィードバックのスケーリングが不正確になります。

 メッセージは20〜3,000文字にする必要があります。
メッセージは20〜3,000文字にする必要があります。