FANUC A16B-3200-0612 | 6軸サーボドライブアンプ基板 — A16B-3200シリーズ、ロボット/CNCサーボ制御基板、産業用スペアパーツ、日本製
概要
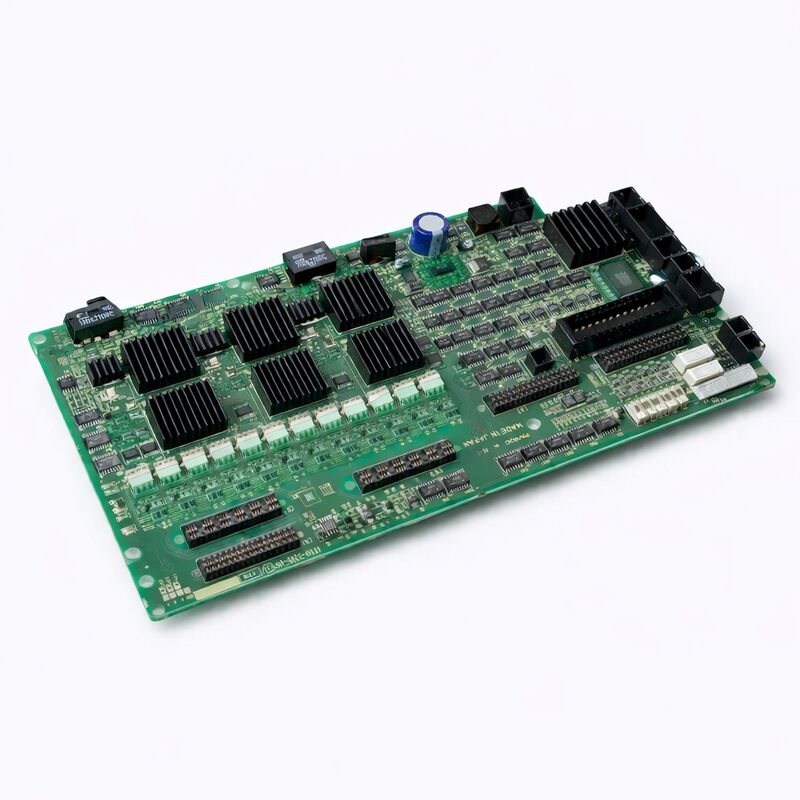
FANUC A16B-3200-0612 は、FANUC の A16B-3200 シリーズに属するサーボドライブアンプ基板です。このシリーズは、1990年代後半から2010年代にかけての FANUC の CNC およびロボット制御プラットフォームを網羅するプリント基板群です。A16B-3200 シリーズは広範であり、メインCPU基板、ロボットメイン基板、サーボドライブ制御基板、通信インターフェース基板など、複数の FANUC 製品世代にわたるものが含まれます。「-0612」バリアントが6軸サーボドライブアンプ基板であることは、その物理的な構造によって確認できます。基板上には、複数の高出力ICパッケージとヒートシンクアセンブリが配置されており、それぞれが1つのサーボ軸のIGBTへのゲート駆動信号を担当しています。
FANUCロボットまたは多軸CNCドライブキャビネットでは、サーボ制御電子機器は、CNC/ロボットコントローラーのコマンド出力と、サーボモーターに電流を供給する物理的なIGBTパワーステージの間に位置します。
A16B-3200-0612 はこの重要な中間位置を占めています。ロボットまたはCNC CPUから軸の位置および速度コマンドを受信し、リアルタイムのサーボ制御ループ計算を実行し、パワースイッチング素子を駆動するPWM信号を生成します。
機能的なサーボ制御基板がない場合、モーター、機械的な駆動系、または電源の状態に関わらず、軸の動きは一切不可能になります。
A16B-3200-0612 が特定された R-30iA Mate コントローラーは、FANUC のコンパクトロボットコントローラーであり、小型ロボット向けに設計されています。R-2000iA Mate、M-10iA、M-20iA、および関連するコンパクトロボットシリーズで一般的に見られ、組み立て、マテリアルハンドリング、溶接、ピッキング&プレースなどの用途で使用されています。
R-30iA Mate のコンパクトなフォームファクターは、電源、アンプ、制御電子機器を密にパッケージ化されたキャビネットに統合しており、コントローラー全体の交換ではなく、基板レベルでの保守が優先されるメンテナンスアプローチとなっています。
主な仕様
パラメータ
値
| シリーズ |
A16B-3200 |
| 機能 |
6軸サーボドライブアンプ基板 |
| 構成 |
マルチIC、ヒートシンクアセンブリ付き |
| 既知の用途 |
R-30iA Mate ロボットコントローラー |
| 原産国 |
日本 |
| ステータス |
生産終了スペア |
| 6軸サーボ制御 — 基板の背後にあるアーキテクチャ |
6軸サーボ制御基板は、6つのサーボモーター軸の同時かつ独立した制御を処理します。これは、一般的な産業用ロボットアームの6つの関節(J1からJ6)に相当します。 |
各軸は、PWMキャリア周波数(通常4〜8kHz)で実行される独自の制御ループを必要とします。これは、ジョイントエンコーダーの位置を読み取り、コマンド位置と比較し、速度と位置のエラーを通じて電流参照を計算し、軸のIGBTブリッジに適切なPWMデューティサイクルを出力することを含みます。
6つのループすべてが、互いに中断することなく、PWMサイクルごとに並列に実行されます。
A16B-3200-0612 に見えるヒートシンクは、6つの高周波ゲート駆動回路を同時に実行することによる熱負荷を反映しています。
ゲート駆動ICは、駆動するIGBTのゲート電荷、ゲート駆動電圧、およびスイッチング周波数に比例した電力を消費します。
6軸全体で6kHzのPWMの場合、ゲート駆動の合計消費電力は大きくなります。ヒートシンクは、ゲート駆動ICが最大接合温度内に留まることを保証し、サーボ性能を低下させたり、ICの早期故障を引き起こしたりする熱によるドリフトを防ぎます。
故障した A16B-3200-0612 の特定
R-30iA Mate または類似システムでサーボドライブアンプ基板が故障すると、ロボットコントローラーはサーボ準備完了状態を確立できません。
ペンダントには通常、サーボシステムカテゴリのアラーム(FANUCロボット用語ではSRVO-alarmコード)が表示され、軸レベルのサーボ通信またはドライブの障害を示します。
一般的な表示は次のとおりです。
複数の軸が同時にアラームを発生:
A16B-3200-0612 は6軸すべてを処理するため、基板の故障はしばしば1つだけでなく、すべての軸に同時に影響します。対照的に、単軸のサーボ障害は、基板の故障よりもモーター、ケーブル、またはエンコーダーの問題である可能性が高いです。
電源投入後にサーボ準備完了状態を確立できない: サーボアンプ基板が電源とゲートドライバ回路を確認するドライブ初期化シーケンスが、明確な電源電圧にもかかわらず繰り返し失敗します。
特定のアラームコード: 複数の軸でSRVO-047(サーボモーター速度エラー)が発生したり、通信タイプのサーボアラームが発生したりする場合、機械的またはモーターの障害がないことを考慮すると、アンプ基板が障害の原因である可能性が高いです。
よくある質問Q1: A16B-3200-0612 は R-30iA Mate 以外のシステムでも使用できますか?また、互換性はどのように確認されますか?
A16B-3200-0612 は R-30iA Mate コントローラーで特定されましたが、A16B-3200 シリーズは複数の FANUC プラットフォームにまたがっています。特定のシステムとの互換性を確保するには、基板のコネクタレイアウト、スロット寸法、およびインターフェースプロトコルをターゲットシステムのバックプレーンおよびサーボドライブアーキテクチャに一致させる必要があります。
R-30iA Mate 以外のシステムに注文する前に、コントローラーのメンテナンスマニュアルまたはスペアパーツリストで部品番号を確認してください。
互換性のないピン配置やプロトコルを持つ基板を取り付けると、基板とシステムの双方に損傷を与える可能性があります。
Q2: 基板は廃止された機械から取り外され、個別にテストされていません。リスクは何ですか?
廃止されたシステムから取り外された未テストの基板は、未知の品質レベルを表します。完全に機能している場合もあれば、機械を廃止したのと同じイベントで故障している場合もあります。
生産システムに取り付ける前に、可能な場合は互換性のあるテストリグで基板をテストするか、最初の電源投入が実質的にフィールドテストであることを十分に認識して取り付けてください。未テストの基板を生産ロボットに取り付ける前に、バックアップ計画(別のスペア基板、または待機中の修理センター)を用意することで、ダウンタイムのリスクを最小限に抑えることができます。
Q3: A16B-3200-0612 を取り付ける前に検証するために必要なツールまたはテストリグは何ですか?
適切なテストには、互換性のある FANUC ロボットまたは CNC コントローラーのテストリグが必要です。これは、基板が設計されたのと同じコントローラータイプであり、機能的なサーボアンプ電源、接続されたサーボモーター(または負荷抵抗)のセット、およびロボットの移動コマンドを実行できる必要があります。
FANUC の専門修理センターは、基板レベルの検証専用にこのようなテストリグを維持しています。
互換性のあるリグがない場合、ターゲットの生産機械での機能テストが唯一の選択肢となりますが、交換用基板も故障している場合はダウンタイムが長くなるリスクがあります。
Q4: 3つのチップのヒートシンクが基板からなくなっています。これは機能に影響しますか?
ゲート駆動ICのヒートシンクの欠落は、動作中の熱故障のリスクを高めます。ヒートシンクのないゲート駆動ICは、低いデューティサイクルまたは低い周囲温度では仕様内で動作する可能性がありますが、暖かいキャビネット環境での持続的な高周波動作中に過熱する可能性があります。
取り付け前に、欠落しているヒートシンクを適切な熱伝導材と同等のヒートシンクハードウェアで交換する必要があります。
ICパッケージのサイズと電力消費量が正しいヒートシンク仕様を決定します。熱抵抗要件については、関連するICデータシートを参照してください。
Q5: A16B-3200-0612 を交換する前に、元の機械からどのようなバックアップまたはドキュメントを準備する必要がありますか?
ロボットシステムの場合、以下のものをバックアップしてください:すべてのロボットプログラム(PROG画面 — ALL.TPバックアップ)、すべてのシステムパラメータ(SYSVARファイル)、マスタリングデータ(ジョイントエンコーダーの参照位置 — 基板交換後のロボット精度に不可欠)、および任意のI/O構成データ。
CNCシステムの場合、以下のものをバックアップしてください:すべてのCNCパラメータ、PMCラダー、およびパートプログラム。
サーボ制御基板自体はこれらのデータを保存しません(機械データという観点からはステートレスです)が、交換手順では特定の揮発性サーボ状態をクリアする可能性のあるサーボ再起動シーケンスが必要になる場合があります。生産システムで基板交換を開始する前に、すべての重要なデータは外部にバックアップしておく必要があります。

 メッセージは20〜3,000文字にする必要があります。
メッセージは20〜3,000文字にする必要があります。