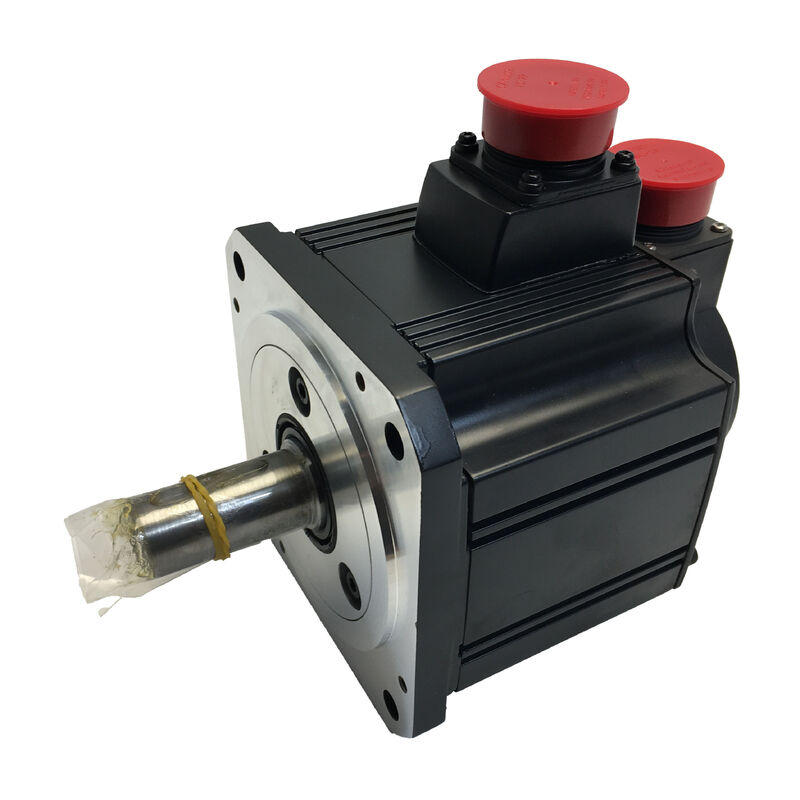
Mitsubishi HC-SFS702B (HCSFS702B) 電気磁気ブレーキ付き7kW交流サーボモーター,直軸,2000rpm,MELSERVO J2-スーパーシリーズ
製品概要
部品番号:HC-SFS702B
また,以下のように検索しました:HCSFS702B,HC SFS 702B,HC-SFS 702B
シリーズ:三?? メルセルボ HC-SFS (J2-スーパー世代)
分類:中等慣性ACブラシレスサーボモーター 7 kW 200V級 2000 rpm 直軸 春用電磁ブレーキ
この モーター は 何 に 用い られ て い ます か
7キロワット 33.4ニュートンメートル連続トルク 2千回転/分で維持 100ニュートンメートル 要求に応じて加速24Vがコイルから取り除かれた瞬間,軸を機械的に保持するスプリングによる電磁ブレーキ.
について三?? HC-SFS702BHC-SFS 2000rpmファミリーの 7kWブレーキメンバーです.軸が小さすぎるときに指定するモーターです.負荷を重力構成要素で運ぶが,サーボ電流が消えた場合,制限なく移動する絶対軸位置を報告する必要があり,それを探すための参照回帰運動なしに,即時の電力を返します.
巨大な垂直軸で ゲンター加工センターの重いスピンドルヘッド,サーボ駆動エレベーターで持ち上げられるパレット製の工品,大きなポータルミルの対比Zスライド 障害防止ブレーキと絶対エンコーダの組み合わせは,サーボロックとインクリメンタルエンコーダーよりも機能アップグレードではありません17ビット絶対エンコーダは131で,ブレーキは電源を消したときに常に機械的に負荷を保持します.072 ppr 切断された場合でも 正確な軸の角を保持するMR-J2S-700増幅器のA6BAT電池によってサポートされます. 機械が再起動すると,Eストップ,停電,シフト変更の後,軸は既知の,安全な状態にあります.機械的に保持された位置制御機が位置を正確に知っています
テクニカル仕様
| パラメータ |
価値 |
| 部分番号 |
HC-SFS702B |
| 定数出力 |
7,000W (7 kW) |
| 供給電圧 |
200Vクラス (3相 200~230V AC) |
| 定速 |
21000回転/分 |
| 最大速度 |
31000回転/分 |
| 定数トルク |
33.4 Nm |
| ピークトルク |
100 Nm |
| エコーダタイプ |
17 ビットのシリアル絶対値 |
| エンコーダ解像度 |
131,072 ppr |
| シャフトタイプ |
ストレート (キーウェイなし) |
| 電磁ブレーキ |
スプリング付きで電気が放出される (24V DC) |
| フレンジの大きさ |
176 × 176 mm |
| 保護評価 |
IP65 |
| オイルシール |
装着 |
| 慣性クラス |
中程度の慣性 |
| 環境温度 (操作) |
0°Cから+40°C |
| 貯蔵温度 |
−15°Cから+70°C |
| 振動抵抗 (X軸) |
24.5 m/s2 |
| 振動抵抗 (Y軸) |
29.4 m/s2 |
| 互換性のあるアンプ |
MR-J2S-700A / MR-J2S-700B / MR-J2S-700CP |
| シリーズ生成 |
MELSERVO J2-スーパー |
| ステータス |
生産停止 備品として利用可能 |
ブレーキ メカニズム: 春にかけられ,電気で放出される
HC-SFS702Bに組み込まれたすべての設計決定の中で,ブレーキタイプは,エンジンの故障防止行動を決定するので,最も注意を払うに値します.そして,高トルクの垂直軸で7kWで制御された停止と危険な停止を区別するのは 障害防止の行動です
HC-SFS702Bに搭載されたブレーキはスプリングを施し,電気を放出するスプリングは,フレーク表面に対して摩擦ディスクをデフォルトで保持します.ブレーキコイルに24VDCを適用すると,磁場が発生し,ディスクを表面から引き離します.軸を回転させる24Vの電源を削除すると,スプリングはすぐに再起動します.中間状態,徐々に消える状態,サーボ電子機器の機能に依存することはありません.ブレーキが適用されます.
これは,E-ストップが電力を切断し,ブレーキを押します. パネルの故障が24Vを切断し,ブレーキを押します. サイクル終了時に計画されたセルボオフ,ブレーキを押します. サイクル中の任意のタイミングで計画外の停電,ブレーキが動いている7kWの軸とその重量は 機械的に停止します ソフトウェアやアンプ機能や PLC 配列に頼らずに
サーボロックとの対比は顕著である.サーボロック MR-J2S-700の軸位置を維持する能力は,モーターの電流と継続的に調整することで,増幅器が電源を供給する必要があります.起動するサーボ標準的な動作条件下では,サーボロックが信頼性があります.これらの条件が満たされていない場合,保護はありません.重力負荷コンポーネントを搭載した有力重量を持つ7kWの軸この区別は,スプリングブレーキが対処するために存在するものです.
33.4 Nm連続,100 Nmピーク:軸のサイズ設定
HC-SFS 2000rpmの範囲で最大持続するトルクです. これは相当な数です.このモーターを指定したり交換したりする人にとって有用です.
10mmのピッチと90%のスクロール効率のボールスクロール軸では,連続モータートルク33.4Nmは約18.8kNの持続軸力に変換されます.大型のCNC加工センターで見られる最も重いテーブルとワークピースの組み合わせをカバートーク制御モードで動作するローリングドライブの場合,33.4 Nmで2ローリング直径の広い範囲でかなりの緊張と速度能力を表しています.サーボ駆動式プレスフィードでは,材料の進出段階中の持続的なフィード力は,モーターの熱範囲内にある.
100Nmのピークは 連続の3倍です位置付けサイクルの短い加速と減速のトランジエントに利用できます. これは,より大きなモーターを必要とせず,重荷メカニズムで高速な軸移動を可能にします.定位サイクルで,最大トルクで加速する時間の10%を,連続トルク以下で加速する時間の80%を費やします.そして10%の減速は,アンプの熱モデル限界範囲内にとどまりますMR-J2S-700の内蔵電子熱保護装置は この累積的な負荷を追跡し 巻き込みが損傷する温度を見る前に 予測的にアラームを鳴らします
垂直軸について明示的に注意すべき三?? 社のドキュメントから1つの設計ガイドライン:持続する重力トルク構成要素は,重力に対して負荷を保持するためにモーターが継続的に維持しなければならないトルクで,定数連続トルクの70%以下その上限は約23.4Nmですこの数値に近づくか超える垂直軸設計では,持続的な重力トルク要求を減らすために機械的対比が必要である,またはより高い連続トルクを持つモーター.ブレーキは,停止中に機械的に負荷を保持し,静止状態のモーターとアンプからすべての持続的なトルク需要を削除します, モーターは重力負荷を負い,この負荷がこのガイドライン内に保たれれば,保護システムが設計通りに機能する.
ブレーキの配線と配列
ブレーキコイルには専用 24V DC回路サーボアンプの電源から切り離さなければならない.機械パネルには,ブレーキコイルに適した 24V DC 電源,コイル横断の電圧圧抑制機能のあるブレーキリレーが含まれなければならない.フレームの解き放つとサーボ有効配列との関わりを調整するインターロック論理.
解き放たれたとき (ブレーキ開口):サーボはブレーキを離す前に有効この配列は,アンプがセルボロックを確立し,機械式ブレーキリフトの前にポジションを積極的に保持していることを保証します.軸は重力負荷で移動し,アンプが重力垂直軸に反重力がない場合,大きな滑り方を追いつくまでMR-J2S-700のMBR (磁気ブレーキ解放) 出力信号は,サーボ有効に比べて正しく配列されたブレーキリレーのための便利なアンプ管理出力を提供します.MR-J2S-700の操作説明書で,軸動力学に関連した特定のタイミングパラメータを確認する..
停止時 (ブレーキを閉じ):サーボ制御下での休憩に軸を減速し,サーボ有効化を取り除く前にブレーキを押す.動いている軸にブレーキをかける場合 ゆっくり動いている軸であっても 摩擦表面を磨き,ブレーキ組内の熱を生成しますサーボがまず軸を完全に停止させ,その後ブレーキを停止状態を維持するために起動させることで,サーボオフサイクルが頻繁な軸ではブレーキ使用寿命が大幅に延長されます.
超電圧抑制は必須ですブレーキコイルが停止すると 磁場が崩壊して 電気圧が上昇し リレーコンタクトが損傷し 周辺の電子機器に影響します正確に指定された電圧圧抑止器 DC用ダイオードフレームコイル端末のAC 〜のVARISTORまたはRCネットワークはオプションではありません.それは装置の一部です.
絶対エンコーダーと垂直軸再起動のメリット
HC-SFS702Bの131,072pprで 17ビット連続絶対エンコーダは J2-Superエンコーダがするすべてのことをします 高帯域幅速度制御のための細角解像度増幅器内のA6BAT電池によって支持される多回転絶対位置シャフトの動きなしに電源を入れるとすぐに位置を報告する.
特にブレーキ付き垂直軸では,この3つの特徴のうち最後のものが最も操作重量を持っています.
軸を動かすことで見つけなければならない参照マーカーに対する位置を報告する.垂直軸上では,制御器が軸の位置を知る前に,ホーム位置センサーに到達する固定位置の動きが固定装置,作業部位,または停止位置にある道具に接触する機械では,その動きは危険を招き,注意深く順序付けする必要があります.ストップの任意の時点でEストップが発生する可能性がある生産環境の機械で,インクリメンタル・エンコーダー軸停止中継の後,再起動手順は些細なものではありません.
HC-SFS702Bの絶対エンコーダーとスプリングブレーキで 再起動手順は パネルを動かし,ブレーキが軸を機械的に保持し,エンコーダがアンプに正確なシャフトの角度を報告します制御器がサーボロックを設定し,ブレーキは正しい順序で放出され,軸は停止した位置から準備されています.再起動中に負荷接触のリスクがない機械は直ぐに生産に戻ります
バッテリーの保守:MR-J2S-700増幅器のA6BATを最初の低電池アラームで交換する.バッテリーが完全に枯渇することを許可すると,複数のターンカウンタをリセットし,参照回帰サイクルを必要とする.高可用性のある生産ラインバッテリー不足のアラームを緊急のメンテナンスの項目として扱います 次の予定された停止まで延期すべきものではなく カウンターリセットが引き起こす 計画外のダウンタイムを排除します
互換性のあるアンプ
HC-SFS702BはMR-J2S-700増幅器ファミリー ◎ 7kWのJ2-Superプラットフォーム. 3つのインターフェースバリエーションが主要な制御アーキテクチャに対応しています:
MR-J2S-700A外部CNCシステムとPLCからのパルス列の位置コマンドとアナログの速度やトルク参照を受け付けます.すべての制御モードは,位置,速度,トルク,切り替えモードの組み合わせは利用可能です. RS-232Cは,パラメータ設定と診断モニタリングのためにMRコンフィギュレーターに接続します.標準的な選択は,軸が外部制御器からコマンドを受け取る機械工具および一般自動化アプリケーション.
MR-J2S-700BSSCNET光ファイバーシリアルバス経由で三?? AシリーズおよびQシリーズモーションコントローラに接続する.すべての軸コマンドとエンコーダーフィードバックは,ファイバーネットワークを介して移動する.大型多軸機械で ゲンター加工センターSSCNETは,アナログとパルスインターフェースが達成できない軸間のリアルタイム同期を提供します.垂直軸と水平軸を協調して動いている場合この同期は,イベントの開始と停止時に特に重要です.
MR-J2S-700CPI/O または CC-Link コマンドで起動される最大 31 つのストレージされたポイントテーブル位置を備えた組み込み単軸位置位置位置付けを備えています.独立した垂直位置位置付け軸の場合は,エレベーターの機械他の軸との調整を必要としない,CPは専用のモーションコントローラーのコストを排除します.
すべての3つのバージョンには,ブレーキリレー配列のMBR出力が含まれ,電子熱過負荷保護,超速保護を含むJ2-スーパー保護機能の完全なセットをサポート,エンコーダの故障検知と再生電圧過電防止
互換性に関する注意事項:HC-SFS702BにはMR-J2S-700増幅器が必要である.これは17ビットJ2-Superエンコーダープロトコルを読み取れない第一世代のMR-J2-700と互換性がない.更新アダプターキットなしのMR-J3またはMR-J4アンプと互換性がないMR-J2-700 オリジナルのハードウェアを実行するマシンでは,HC-SF702B機械的に同一で 14 ビットエンコーダーで,ブレーキ付きの直軸
HC-SFS 2000rpm ファミリー 7kW 位置
| モデル |
生産量 |
定数トルク |
ピークトルク |
ブレーキ |
フレンズ |
| HC-SFS202B |
21000W |
9.55 Nm |
28.6 Nm |
スプリング用 |
176 × 176 mm |
| HC-SFS352B |
3500W |
16.7 Nm |
50.1 Nm |
スプリング用 |
176 × 176 mm |
| HC-SFS502B |
51000W |
23.9 Nm |
71.6 Nm |
スプリング用 |
176 × 176 mm |
| HC-SFS702B |
71000W |
33.4 Nm |
100 Nm |
スプリング用 |
176 × 176 mm |
HC-SFS702BはHC-SFS 2000rpm範囲内の最高トルクブレーキエンジンのこの表の4つのモデルすべては,同じ176 × 176mmのマウントフレンズを共有しています.9 Nm) に HC-SFS702B (33.4 Nm) は約40%で,5kW装置の持続扭矩制限に近い軸が将来の負荷変化やより高い加速要求のためにヘッドルームを必要とする場合,重要になります.または重力負荷の軸で70%のガイドラインに近づくトークリザーブ.
HC-SFS702ファミリーは7kW2000rpmで4つの軸とブレーキの構成をカバーしています:ブレーキなしの直軸 (HC-SFS702),ブレーキ付きの直軸 (HC-SFS702B),ブレーキなしのキー軸 (HC-SFS702K),ブレーキ付きの鍵軸 (HC-SFS702BK)MR-J2S-700のアンプを使っています
典型的な用途
大型機械加工センターやゲンターミールでの重量的な垂直Z軸HC-SFS702Bの定義アプリケーション 大型スピンドルヘッドポートアル加工センターや大きな水平掘削工場のZスライド組は,2000rpmで7kWのサーボ容量が必要です.自動停止とEストップの位置を維持するための故障防止ブレーキ,安全な再起動のための絶対位置認識.HC-SFS702Bは3つすべてを提供します.
サーボ駆動のエレベーターとエレベーターメカニズム重量パレッティ化作業部品リフト,ツールマガジンリフト,部品保管システムリフト,機械セルおよびFMS装置.このスケールの重力負荷積み重ねられた部品マガジン 生産効率的な再起動のために安全のためにスプリングブレーキと絶対エンコーダを必要とします33.4 Nm の連続トルクにより,作業負荷範囲全体で持続的な持ち上げ力に対応できます.
大型プレス・形作機 垂直ラームドライブサーボ駆動式プレスラムドライブ,ダイクッション軸,垂直ラームが大きな負荷を負い,工具の交換中にストロックの任意の位置で保持しなければならないとき,サーボ駆動のストレイスナーまたはレベラー軸中間停止と緊急停止
垂直軸の重用回転テーブルとインデクシングドライブサーボ駆動の傾き回転テーブル,スルーニオン軸,大型加工センターの傾斜式インデックスメカニズムで,テーブルと作業部品の重量結合は,完全にバランスの取れた位置を除いて,重力トルク構成要素をすべて大きくします.障害防止ブレーキは,サーボ状態に関係なく,テーブルを任意の角度で保持します.
産業用巻き機 垂直ロールアボアを持つ主駆動装置大型巻き込み機械 垂直軸に重い紙,フィルム,または繊維の巻物を取り入れ 生産停止,巻物交換の際に機械的な保持を必要とする巻物重量スライス操作.
よく 聞かれる 質問
Q1: HC-SFS702Bと HC-SFS702の違いは何ですか?
両者は7kW,2000rpm,J2-Superモーターは176 × 176mmのフレンズで,17ビットエンコーダー,直軸,同一の電気仕様があります.唯一の違いはブレーキです:HC-SFS702にはブレーキがない静止位置は増幅器のサーボロックによって保持されます.HC-SFS702Bにはスプリングによる電磁ブレーキがあります24Vのコイル電源を外すと機械的に起動する.垂直軸,傾斜のフィード,重力負荷メカニズムでHC-SFS702Bを使用します.サーボオフ時の軸移動が危険である場合確認された水平または対称的に負荷された軸では,HC-SFS702はよりシンプルで軽い.
Q2:ブレーキは"スプリングで動かす"と記述されています. 停電時に何が起こるのですか?
スプリングはデフォルトでブレーキを押します 軸を自由に保つためにコイルは継続的に電力を供給する必要があります. 停電はコイルから24Vを取り出し,スプリングは直ちにブレーキディスクを起動します.そして軸は機械的に停止し,停止し続けますこれはスプリング式設計の主要な安全性優位性であり,計画外の電源断絶を含むすべての障害モードで機械的な軸拘束を提供します.ソフトウェアがない軸を保持するためにPLC配列は必要ありません. 春はそれを受動的にします.
Q3: HC-SFS702Bは,既存のマシンで HC-SF702Bを入れ替えますか?
機械的に はい 軸の直径とブレーキコネクタの配置は同じです.HC-SF702Bには14ビットエンコーダーがありますMR-J2-700とMR-J2S-700の両方のアンプと互換性がありますHC-SFS702Bには17ビットエンコーダーがありますMR-J2S-700増幅器のみが必要です.マシンがオリジナルの第一世代のMR-J2-700増幅器を実行した場合,HC-SF702Bのみが動作します.マシンがMR-J2S-700に搭載されている場合,HC-SFS702Bは,より高いエンコーダー解像度を持つ直接ドロップイン代替機です..
Q4:絶対エンコーダーバックアップ電池は?
バッテリー三?? A6BAT リチウム電池電子機器の内側にあるMR-J2S-700増幅器電源をオフにすることで 絶対数値を保持しますこれは,エンコーダが正確な軸の角度を維持している間,軸が機械的に位置を維持することを意味します.A6BATをアンプからの最初の低電池アラームで交換する.
Q5:ブレーキコイルの配線にはどんな電圧圧抑制が必要ですか?
ブレーキコイルは,その端末全体で電圧圧抑制を備えている必要がありますフライバックダイオード(DCコイル用) またはバリスターやRCスナバー(交流の場合は) 圧力のピークを吸収するために,コイルが消電されたときに発生します.リレーが開くときの誘導キックはリレーのコンタクトを損傷し,近くの電子機器に影響を与える可能性があります.これは工業パネル設計におけるインダクティブ負荷の標準要件です. The specific component rating should be matched to the brake coil's inductance and the relay contact rating — consult the Mitsubishi servo motor instruction manual or the relay manufacturer's application data for the appropriate specification.

 メッセージは20〜3,000文字にする必要があります。
メッセージは20〜3,000文字にする必要があります。