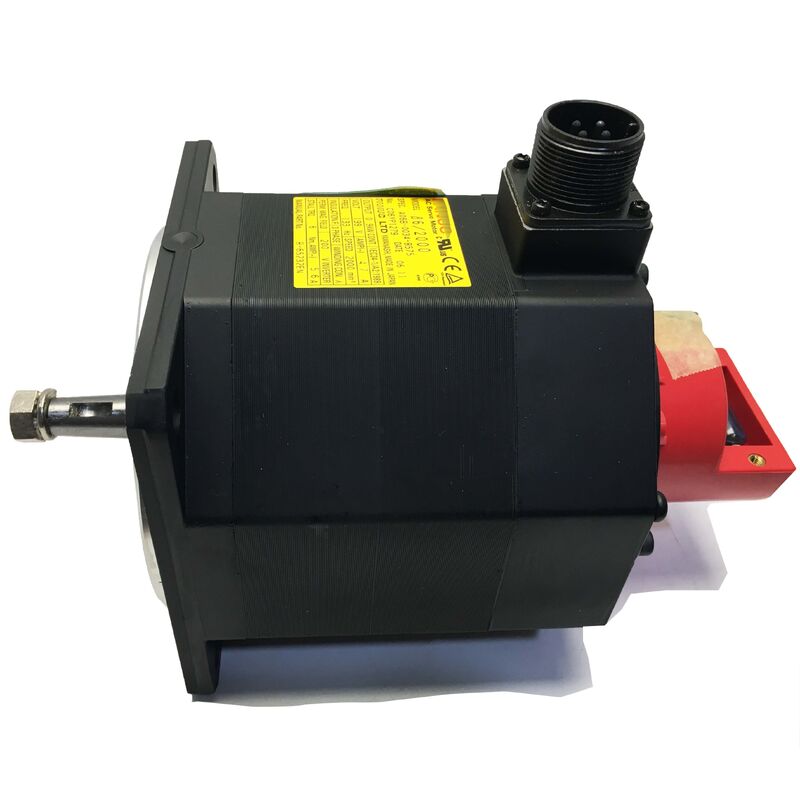
FANUC A06B-0034-B577 ◎ ベータB6/2000 ACサーボモーター
B6/2000 収縮型 型式 B577
A06B-0034-B577は,FANUCのB6/2000サーボモーターで,角軸,i32bエンコーダー構成です.B6の指定は,このミディアムフレームベータモーターのトルククラスを識別します.11.2kg それは,軽いポジショニング任務ではなく,実際の持続的な負荷を担うCNC軸駆動のために設計された物理的に実質的なモーターです.
角型軸は,このバージョンの定義する機械的特徴です.軸末糸を通る引き込みボルトで軸的に軸に引っ張られているとき,コナー幾何学自中心・ハブは,毎回同じ幾何学的位置に座ります. ・最初の設置と,その後のすべての保守除去と再設置の間, ・手動調整または再調整ツールなしで.この繰り返しが,エンジンを交換した後の軸性能が,新しいモーターを設置した瞬間から予測可能であることを意味します..
電気仕様199V/133Hzで最大回転2000rpmで,B6/2000クラスはベータモーター範囲の適速端で動作する.199V/133Hzは,標準200VAC三相電源入力からサーボアンプによって生成されるモーター端末状態です. これは,このモーターのドライブの出力パラメータです.電源の電圧ではなく
ハブ設置:軸末のスローリング穴と引き込みボルトを使用して,軸軸的にノブをコンパーに引っ張ります.コンパーシャフトを押したりハンマーしたりしないでください.衝撃負荷は,i32bエンコーダーと後部ベアリングに直接軸を通ります.
基本規格
| パラメータ |
価値 |
| 部分番号 |
A06B-0034-B577 |
| モーターモデル |
B6/2000 について |
| 最大速度 |
21000回転/分 |
| 電圧 |
199V,133 Hz,3相 |
| シャフト |
角型 |
| エンコーダー |
i32b 増量 |
| 保護 |
IP67 |
| 体重 |
11.2kg |
i32b エンコーダー 追加,ホームリングが必要
i32bは,速度と位置フィードバックのために回転あたり32回信号周期を提供するインクリメンタルエンコーダーである.ポジション制御のためのより高い有効な解像度にこのカウントを処理増量型は,各電源アップ時に基準点からパルス数を数えるによって位置が決定されます.生産を開始する前にホームリングサイクルが必要です.自宅配送なしでパワーアップで絶対位置が必要な場合絶対エンコーダーを持つベータモーター変種が正しい仕様です
よくある質問
Q1:A06B-0034-B577 (角型軸) とA06B-0034-B177 (直線型軸) の違いは何ですか?
両者は同じ電気仕様を持つB6/2000モーターである.B577は角型シャフト,B177はキーウェイの直型シャフトを有する.軸のタイプは,結合インターフェースを決定する 角型のために掘削されたハブは,B577を必要としますキーウェイの穴を持つハブにはB177が必要です.注文する前に既存のコップリングハードウェアを確認してください.
Q2: 機械は毎回電源アップ時にホームリングを必要とします. これはi32bエンコーダーによるのでしょうか?
i32bはインクリメンタル・エンコーダーです 生産開始前にマシンが起動するたびに 自宅回路が必要ですこれは,ベータインクリメンタルエンコーダーモーターを使用するマシンで予想される正常な動作です.定位なしの絶対位置では,絶対エンコーダーを持つモーター変種が必要です.
Q3: 角型軸ハブを正しく設置するには?
モーターのシャフト端のスローリング穴を牽引ボルト (ナッツ+洗浄機) で使って,ハブを軸的にコンパーに引っ張ります.決して押したりハンマーを押したりしないでください. 角軸への衝撃力は,エンコーダーディスクと後部ベアリングに直接送信されます.通常は,設置時にすぐにではなく,振動下で間歇的なエンコーダーアラームとして数週間後に現れるダメージを引き起こす.
Q4: A06B-0034-B577 に置き換えた後,軸は次のエラーを表示します.何をチェックすべきですか?
サーボアンプのモータータイプパラメータがB6/2000仕様に一致していることを確認するまた,エンコーダーケーブルは完全にアンプのフィードバックコネクタに座っている確認し,ケーブルシールドはアンプ端に正しく接地されている設置後,角軸の誤ったアライナメントは,エラーにより増加する機械的摩擦を加え,サーボガインを調整する前に確認する必要があります.
Q5:A06B-0034-B577と互換性のあるサーボアンプは?
B6/2000は,Betaモーター互換性ファミリーのFANUC Beta SVUおよびSVMシリーズ伺服増幅器とペア.特定の増幅器モデルは,駆動システムの軸数と構成に依存する.固定する前に増幅機の電流がB6/2000モーターの電流をカバーすることを確認.

 メッセージは20〜3,000文字にする必要があります。
メッセージは20〜3,000文字にする必要があります。